Eggbot
Setup meines Eggbot
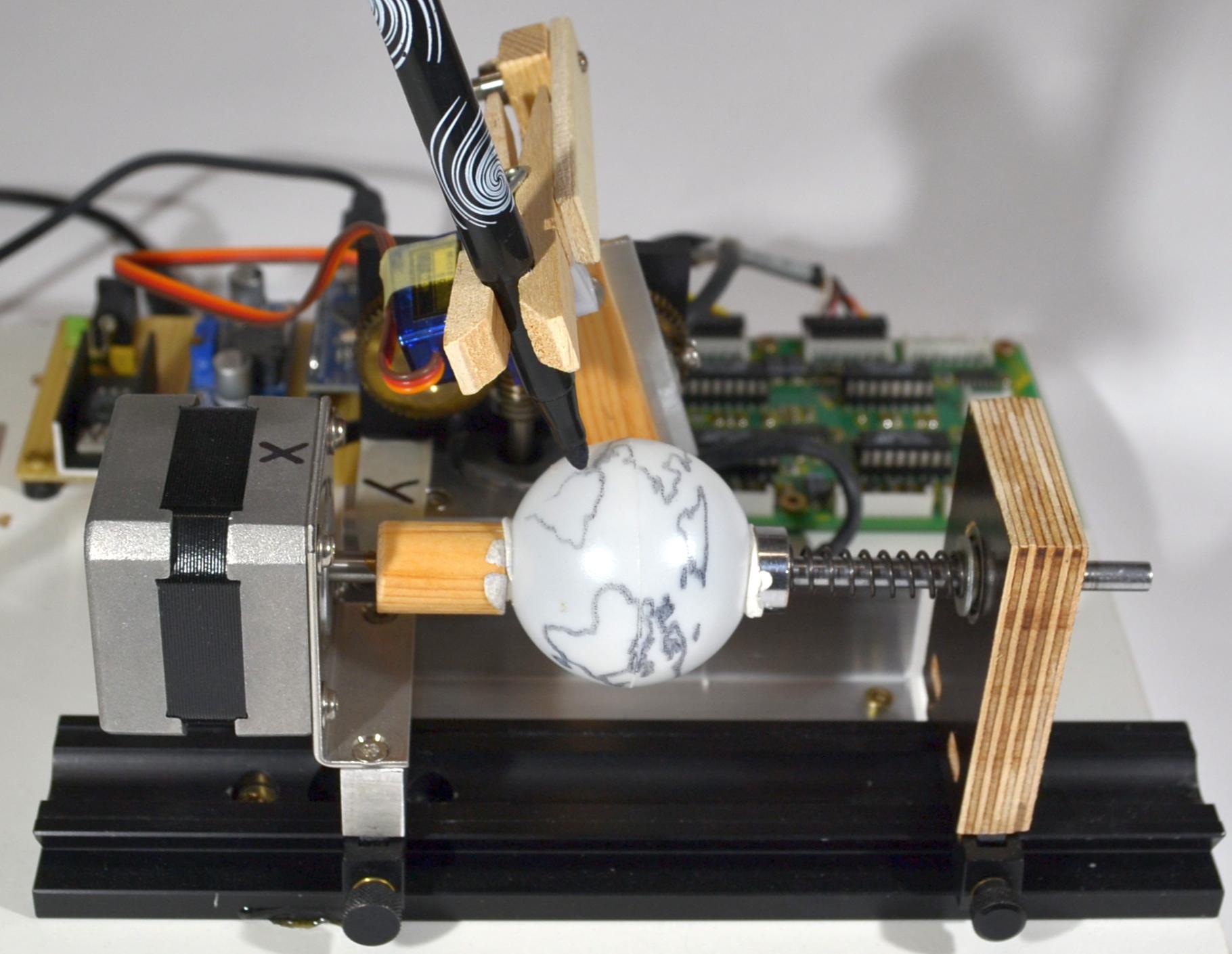
Technische Daten:
- Mein Motortreiber kann nur Halbschrittmode, was zu grob für die Drehachse ist.
- X ist die Drehachse, skaliert auf 360 Einheiten / Umdrehung.
Schrittmotor = 200 steps/turn = 400 half-steps / turn
$100 = 400 / 360 = 1.111 - Y ist die Achse mit dem Stifthalter mit einem Fahrbereich von 110°
Angetrieben von einem Schneckengetriebe 1/50
$101 = 50 * 400 / 360 = 55.555

Das Beispielobjekt ist ein Tischtennisball.
Achtung: wenn ein Ei benutzt wird, muss man darauf achten, dass der Stift weitgenug angehoben und abgesenkt wird. Die Eiform ist etwas schwierig.

Beispielmuster findet man auf Github bei Evil Mad Scientist Laboratories und deren EggBot software: https://github.com/evil-mad/EggBot/tree/master/example%20files
Am Ende der Seite kann man meine Settings runterladen:
- grbl settings
- GRBL-Plotter settings
Video:
Die Quelle ist https://github.com/cprezzi/grbl-servo, der Code muss via Arduino-IDE kompiliert werden. Die verwendbare HEX-Datei 'grbl_v1.1f_Servo.hex' ist in der GRBL-Plotter Zip Datei enthalten. Dies ist eine spezielle Version mit RC-Servo support (wählbar in config.h)
- Die PWM Frequenz wurde auf 61Hz gesetzt (prescaler 1/1024).
- Der Pulsbreitenbereich ist 0.5 - 2.5ms.
- S0 deaktiviert nicht die die PWM, stattdessen wird die Min-Pulsbreite ausgegeben.
- Setze den Setupwert $30=255 um einen S-Wert Bereich von 0-255 zu erhalten.
- Sende M3S0 zum Beginn des GCodes zum Aktivieren des Servos und M5 am Ende des Codes zum Deaktivieren.
$0=10 (Sets time length per step. Minimum 3usec.)
$1=25 (Sets a short hold delay when stopping to let dynamics settle before disabling steppers. Value 255 keeps motors enabled with no delay.)
$2=0 (Inverts the step signal. Set axis bit to invert (00000ZYX).)
$3=0 (Inverts the direction signal. Set axis bit to invert (00000ZYX).)
$4=0 (Inverts the stepper driver enable pin signal.)
$5=0 (Inverts the all of the limit input pins.)
$6=0 (Inverts the probe input pin signal.)
$10=1 (Alters data included in status reports.)
$11=0.010 (Sets how fast Grbl travels through consecutive motions. Lower value slows it down.)
$12=0.002 (Sets the G2 and G3 arc tracing accuracy based on radial error. Beware: A very small value may effect performance.)
$13=0 (Enables inch units when returning any position and rate value that is not a settings value.)
$20=0 (Enables soft limits checks within machine travel and sets alarm when exceeded. Requires homing.)
$21=0 (Enables hard limits. Immediately halts motion and throws an alarm when switch is triggered.)
$22=0 (Enables homing cycle. Requires limit switches on all axes.)
$23=0 (Homing searches for a switch in the positive direction. Set axis bit (00000ZYX) to search in negative direction.)
$24=25.000 (Feed rate to slowly engage limit switch to determine its location accurately.)
$25=500.000 (Seek rate to quickly find the limit switch before the slower locating phase.)
$26=250 (Sets a short delay between phases of homing cycle to let a switch debounce.)
$27=1.000 (Retract distance after triggering switch to disengage it. Homing will fail if switch isn't cleared.)
$30=1000 (Maximum spindle speed. Sets PWM to 100% duty cycle.)
$31=0 (Minimum spindle speed. Sets PWM to 0.4% or lowest duty cycle.)
$32=0 (Enables laser mode. Consecutive G1/2/3 commands will not halt when spindle speed is changed.)
$100=1.111 (X-axis travel resolution in steps per millimeter.)
$101=55.556 (Y-axis travel resolution in steps per millimeter.)
$102=250.000 (Z-axis travel resolution in steps per millimeter.)
$110=10000.000 (X-axis maximum rate. Used as G0 rapid rate.)
$111=600.000 (Y-axis maximum rate. Used as G0 rapid rate.)
$112=500.000 (Z-axis maximum rate. Used as G0 rapid rate.)
$120=500.000 (X-axis acceleration. Used for motion planning to not exceed motor torque and lose steps.)
$121=500.000 (Y-axis acceleration. Used for motion planning to not exceed motor torque and lose steps.)
$122=10.000 (Z-axis acceleration. Used for motion planning to not exceed motor torque and lose steps.)
$130=200.000 (Maximum X-axis travel distance from homing switch. Determines valid machine space for soft-limits and homing search distances.)
$131=200.000 (Maximum Y-axis travel distance from homing switch. Determines valid machine space for soft-limits and homing search distances.)
$132=200.000 (Maximum Z-axis travel distance from homing switch. Determines valid machine space for soft-limits and homing search distances.)
GRBL-Plotter Settings:
Für einen schnellen Erfolg beim Konfigurieren des GRBL-Plotter für diese Anwendung kann diese INI Datei verwendet werden (z.B. via drag & drop).
 Achtung: Diese INI Datei beinhaltet Custom-Button Einstellungen und Farbschema, welche die vorhandenen Einstellungen überschreibt.
Achtung: Diese INI Datei beinhaltet Custom-Button Einstellungen und Farbschema, welche die vorhandenen Einstellungen überschreibt.
Egg Bot INI File for RC Servo Note: a different grbl version is needed!