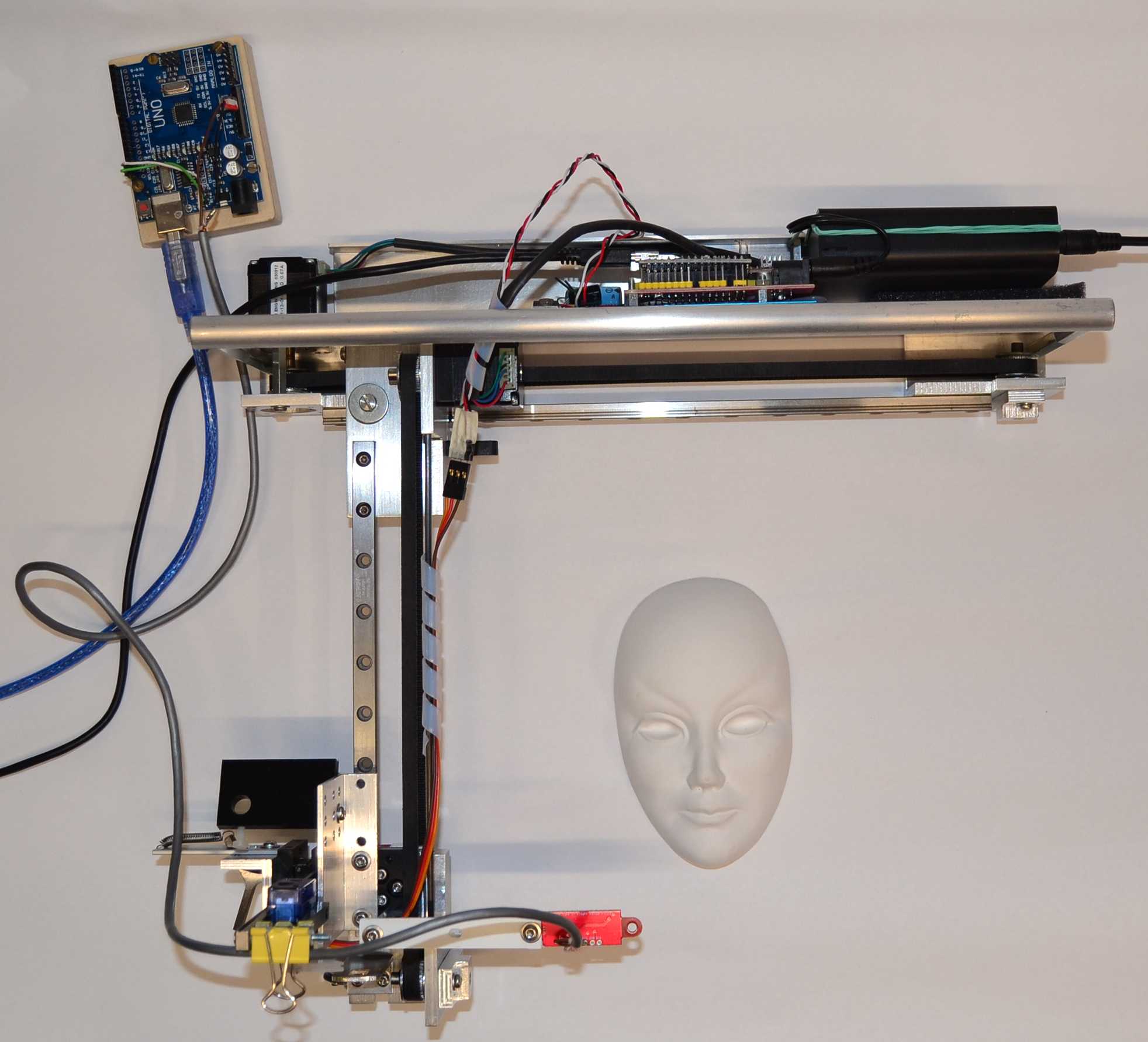
External depth sensor
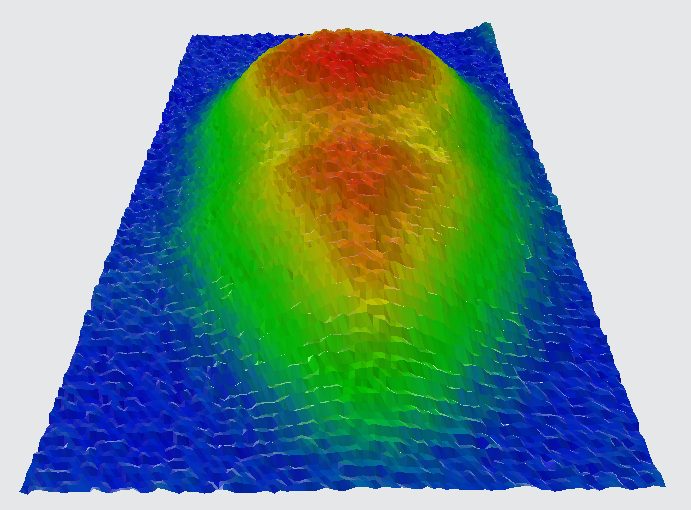
Surface scan with external sensor
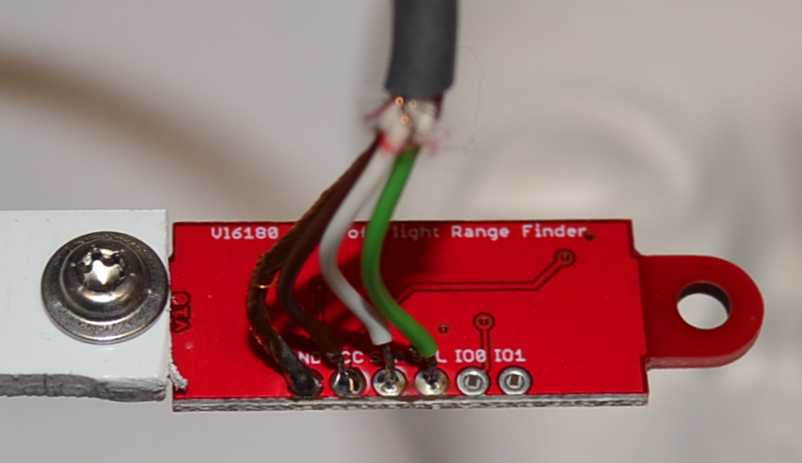
Description of the sensor:
- https://www.adafruit.com/product/3316
- https://www.sparkfun.com/products/12785
- https://funduino.de/nr-43-entfernungsmessung-mit-vl6180x
- https://www.st.com/resource/en/datasheet/vl6180.pdf

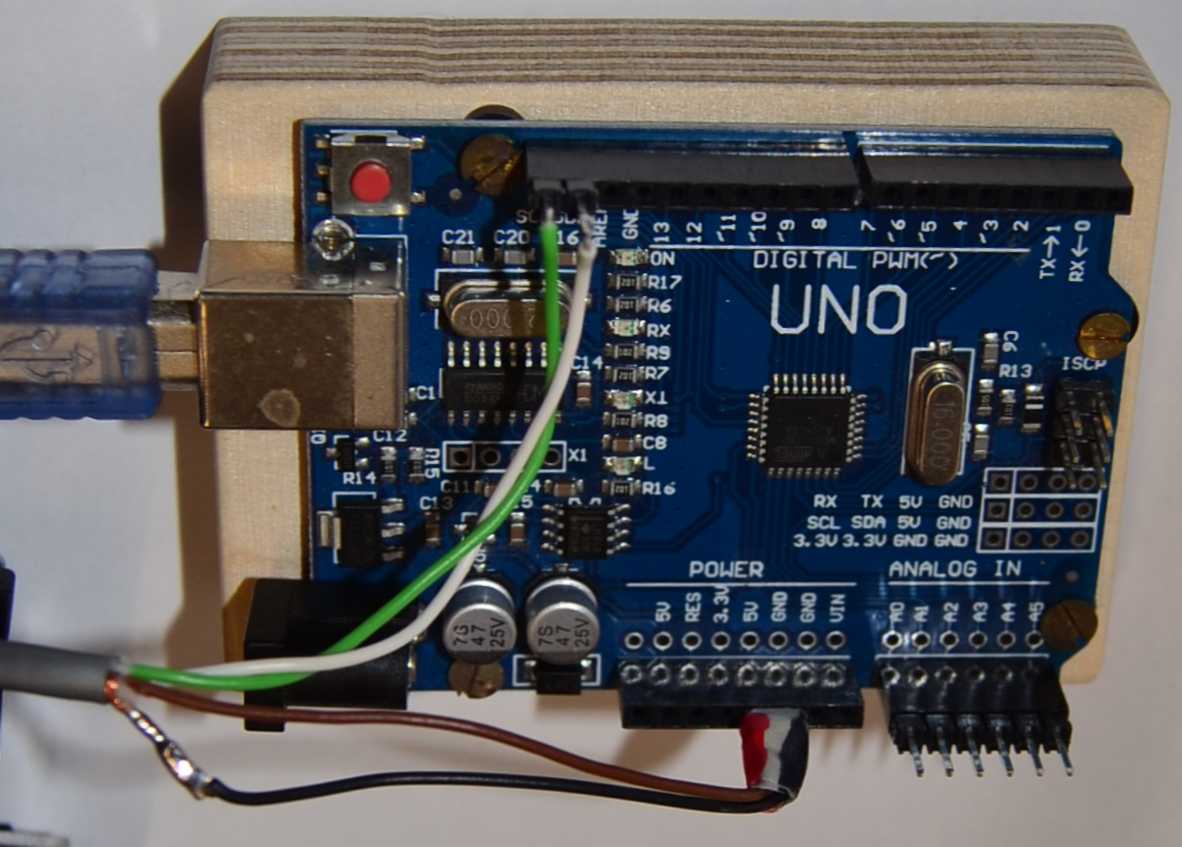
Modified Arduino code from https://learn.adafruit.com/adafruit-vl6180x-time-of-flight-micro-lidar-distance-sensor-breakout/wiring-and-test
#include
#include "Adafruit_VL6180X.h"
// Modified example code from:
// https://learn.adafruit.com/adafruit-vl6180x-time-of-flight-micro-lidar-distance-sensor-breakout/wiring-and-test
//
// 2021-07-23 add filter
Adafruit_VL6180X vl = Adafruit_VL6180X();
uint8_t status;
float range;
float smoothed;
int filterStrength;
void setup()
{
filterStrength = 3; // average of 4 values
Serial.begin(115200);
while (!Serial) {
delay(1);
}
Serial.println("Adafruit VL6180x test!");
if (! vl.begin()) {
Serial.println("Failed to find sensor");
while (1);
}
Serial.println("Sensor found!");
}
void loop()
{
range = vl.readRange(); // using single shot ranging
Filter(smoothed, range, filterStrength);
status = vl.readRangeStatus();
if (status == VL6180X_ERROR_NONE) {
Serial.print("(PRB:Z-"); Serial.print(smoothed, 2); Serial.println(")");
}
delay(50); // range execution time up to 10 ms at 100 mm
}
void Filter(float &OrigVal, int NewVal, int Strength){
OrigVal= ((OrigVal * Strength) + NewVal) / (Strength + 1);
}
Function:
- The sensor will be read every 50 ms (= 20 Hz)
- The average of 4 samples will be calculated
- The value will then be send as a grbl-like probing answer: "(PRB:Z-12.34)" - continuously
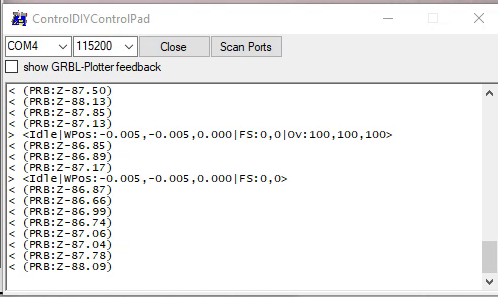
- The DIY-control interface receives and stores the data
- The Serial Com interface takes and uses the last stored data, if an external probing command needs to be processed
Arduino code: vl6180.ino
Map data of the plaster face: face_1mm.map
OBJ data of the plaster face: face_1mm.obj
OBJ data material: face_1mm.mtl
Getting the height map of a plaster face, using an external depth sensor