Setup
[Graphics import] [Tool table] [Tool change] [Program behavior] [Program appearance]
Back to [GUI] [Menu items]
Graphics import
[Graphics import] includes all settings regarding graphics import and G-Code generation (by 'Text creation', 'Simple shape' etc.).
[Path import] [G-Code generation] [G-Code modification] [Use cases]
Path import
Settings regarding import of SVG, DXF, HPGL, CSV, etc. files.
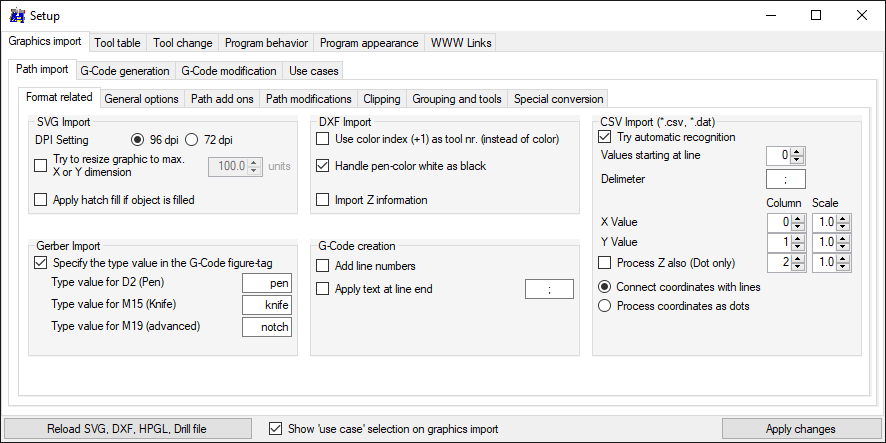
Format related:
E.g.
- SVG: automatically resize to a specific value (to fill your drawing area)
- SVG: automatically apply hatch-fill if fill color is set
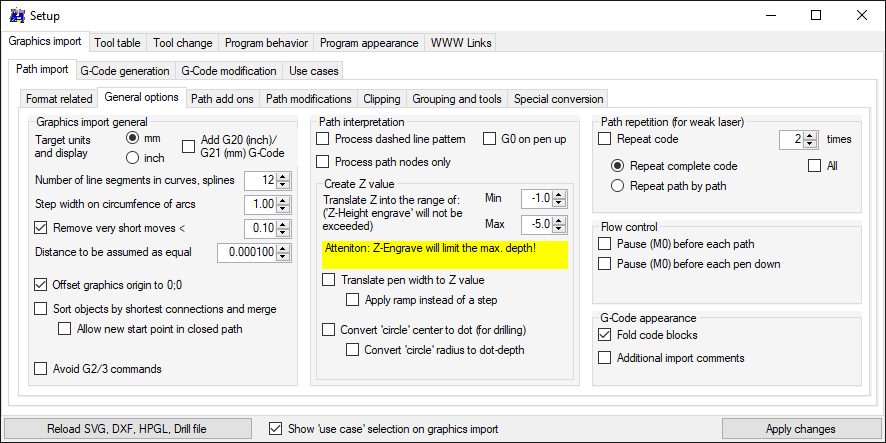
General options:
Accuracy, sorting, how to handle specific patterns, path repetitions.
G-Code appearance
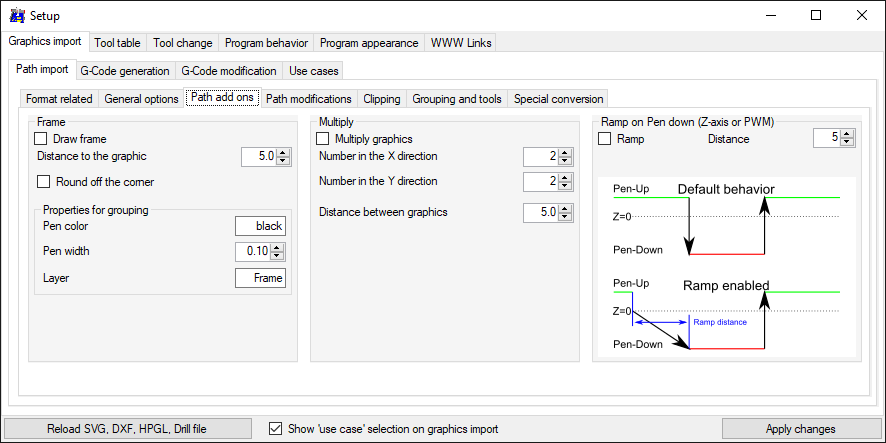
Path add ons:
- Add a frame
- Multiply the imported graphics
- Add a ramp on Z motion
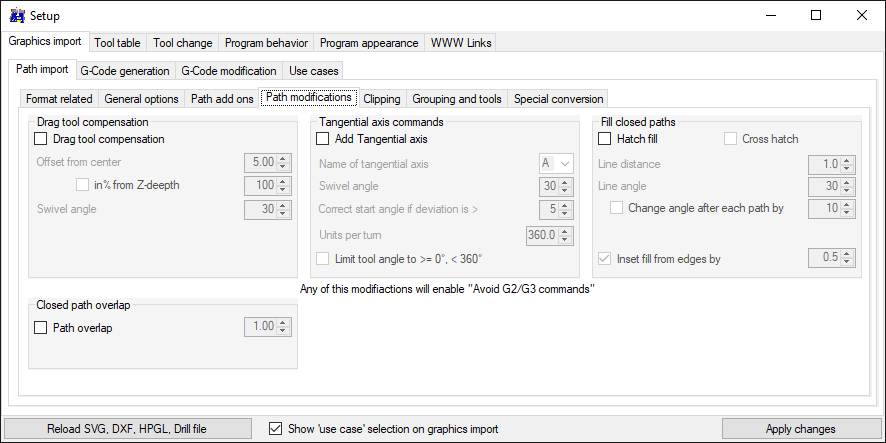
Path modifications:
- Drag tool compensation (for knife or brush) Example 'Drag tool compensation'
- Path overlap on closed paths (laser cutting) Example 'Path overlap'
- Add tangential axis commands (for tangential knife):
- Hatch fill of closed paths Example 'Hatch fill'
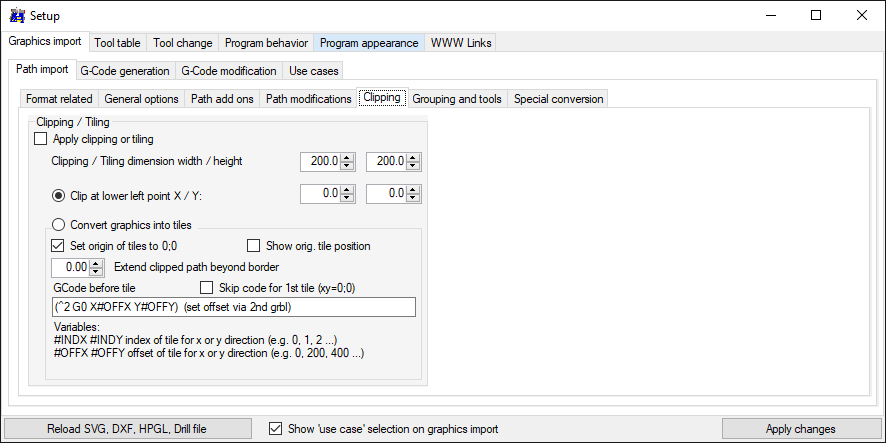
Clipping, Tiling:
Clipping: only process a selected area of the imported graphics.
Tiling: divide the graphics into tiles and process them one by one, apply commands before a tile to feed the material,
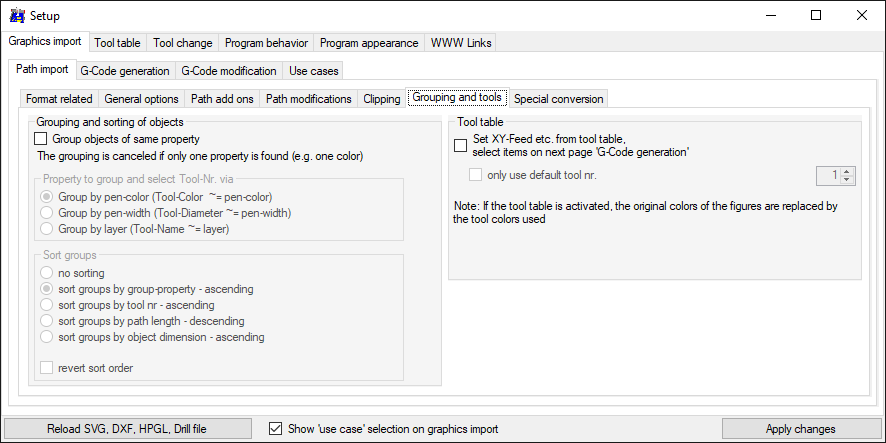
Grouping, Tool table use:
Grouping: group the graphic objects by pen-color, pen-width or layer.
Tool table use: get selected properties (checkboxes 'from tool table' in G-Code generation) from the current tool table.
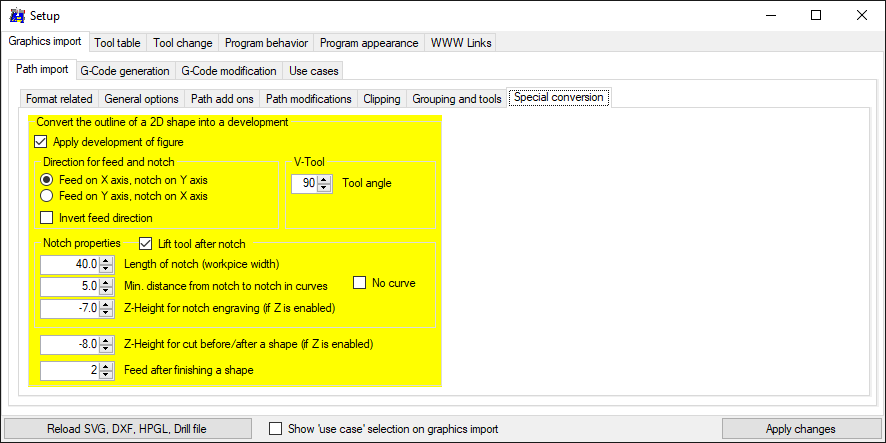
Path development:
Example: character "E" with the given settings:
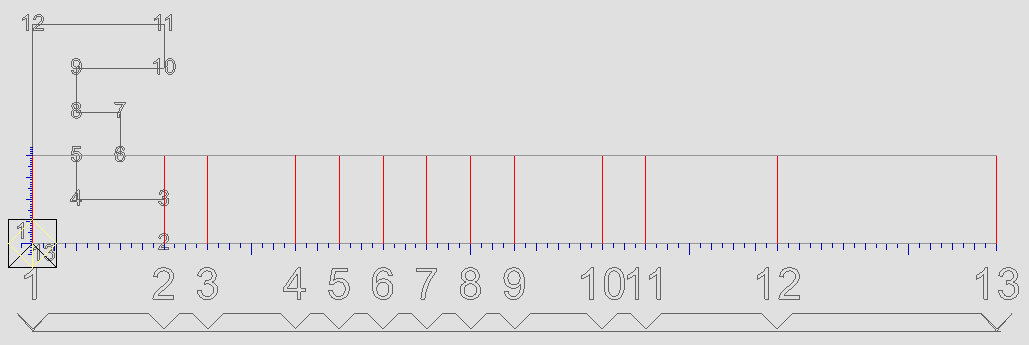
Red lines shows the tool path,gray objects are just for information.
G-Code generation:
Set decimal places (grbl max.: 3 for mm, 4 for inch), code header and footer for individual comands, XY-feed rate, spindle speed, Tool change.
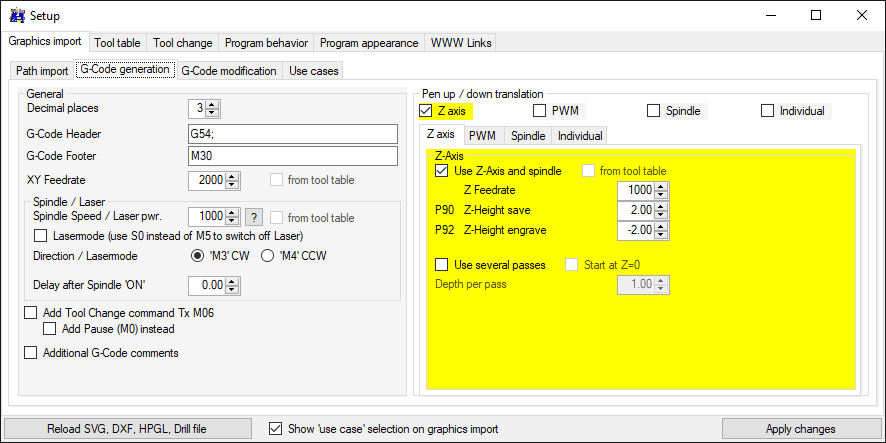
Translate Pen-up/-down commands into Z axis commands
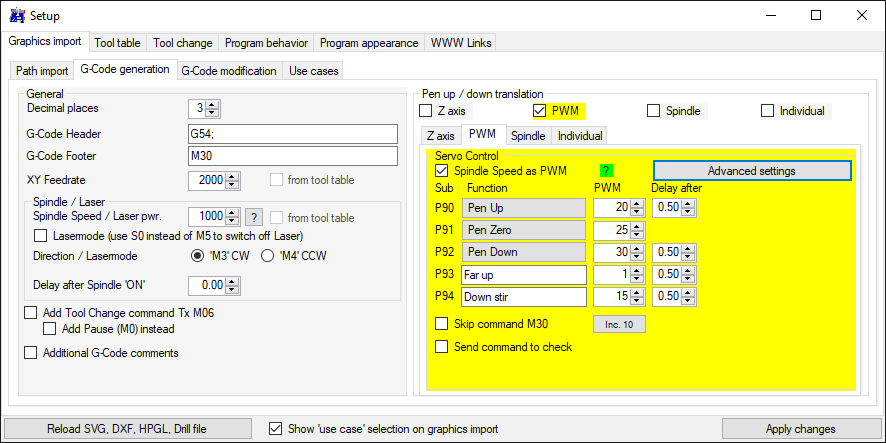
Translate Pen-up/-down commands into PWM (pulse-width-modulation) values to control a RC-servo.
Note: a special grbl version is needed to control a servo.
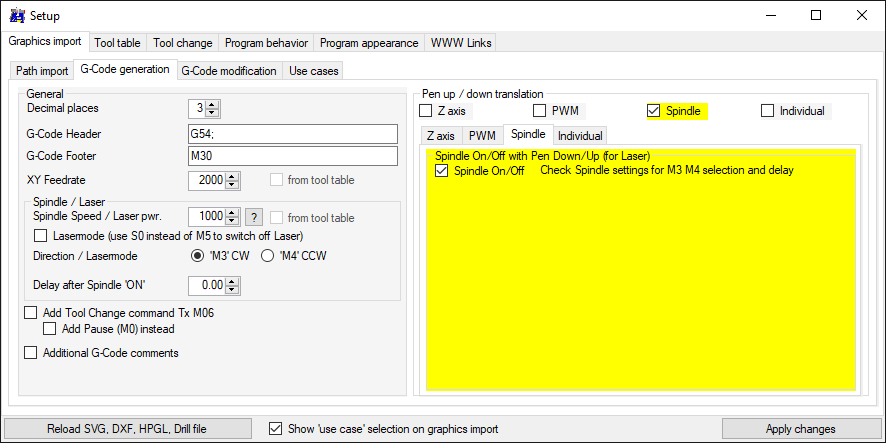
Translate Pen-up/-down commands into spindle (or laser) on / off commands
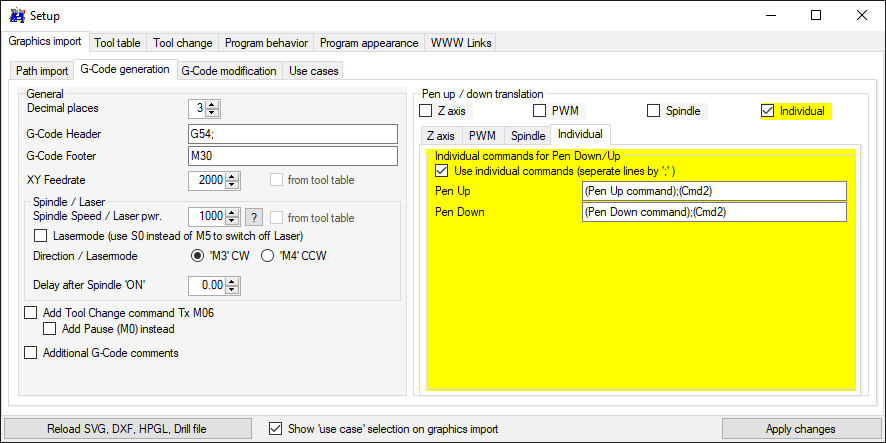
Translate Pen-up/-down commands into individual commands
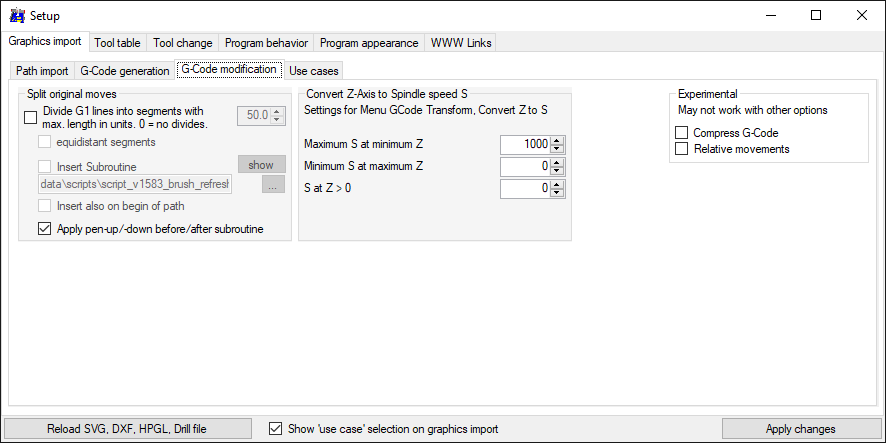
G-Code modification:
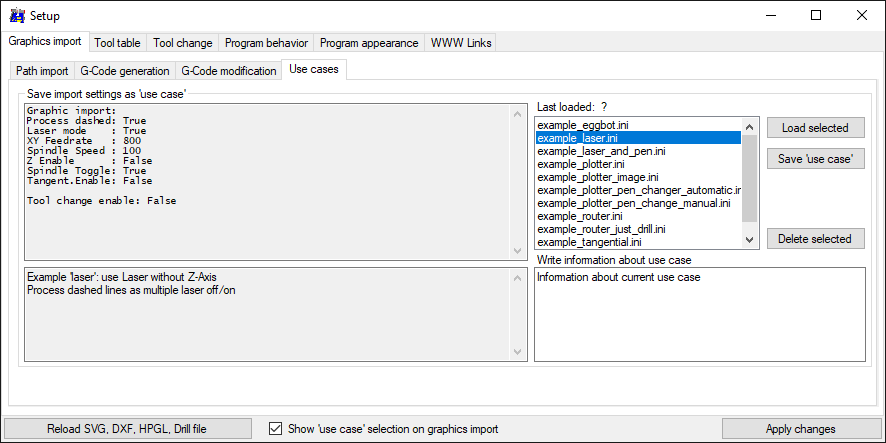
Use cases:
Use cases contains a reduced amount of saved machine settings (ini-file) to do a quick setup of the settings.
Also a saved machine-setup [Menu - File - Export machine settings] can be used as a use-case, when copied to the usecase folder (check [Menu - About] for the current location).
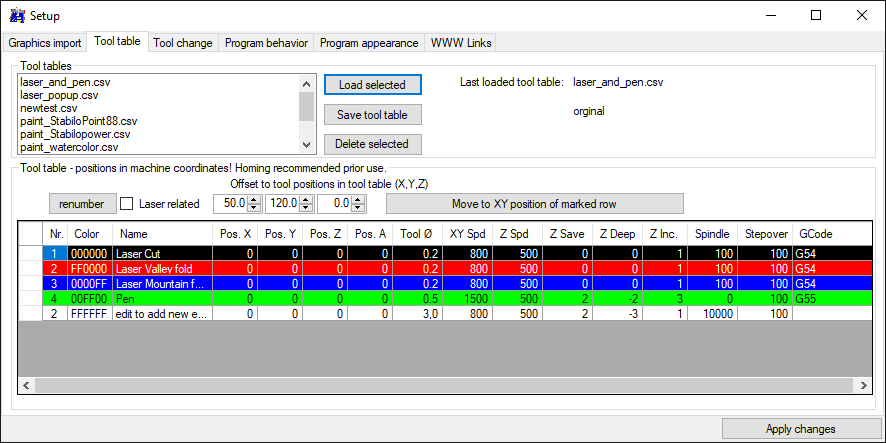
Tool table:
Settings, which are related to specific pen-color or pen-width, if tool table is in use.
Examples: [Laser and Pen] [Manual pen change] [Automatic pen change]
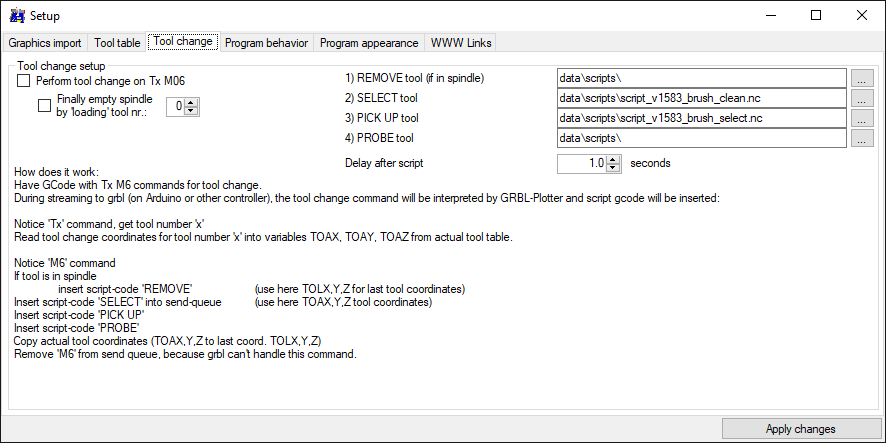
Tool change:
Assign scripts, which will be performed on M06 command. See also 'Automatic pen change'
See also: Tool change how it works
Program behavior:
Settings regarding grbl comunication, grbl settings, G-Code loading and saving, camera shape recognition and Notifier
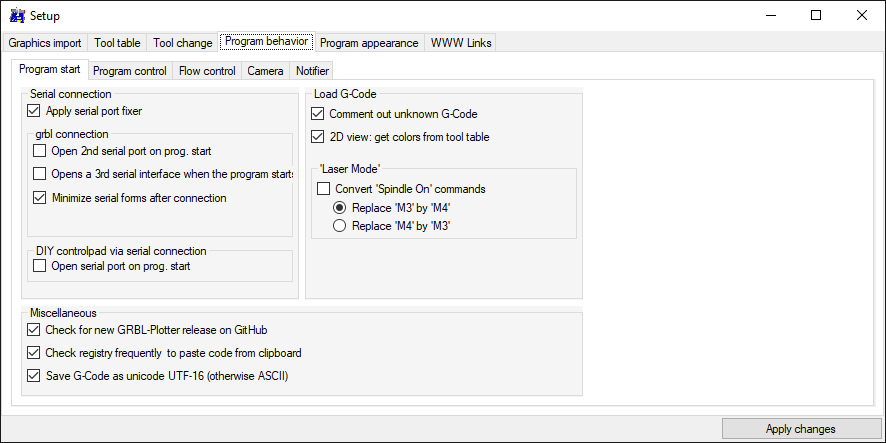
Program start
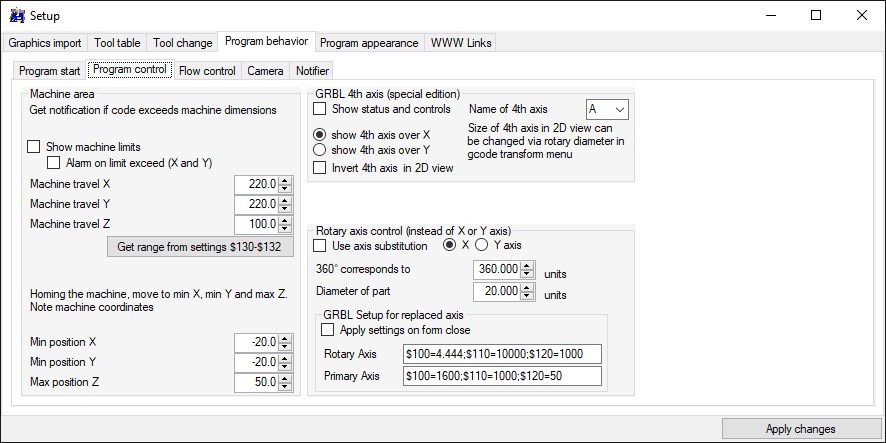
Program control
Machine limits: get warnings if allowed machine area will be left.
Grbl 4th axis: set name and display of 4th axis.
Rotary axis control: use X or Y as rotary axis and setup
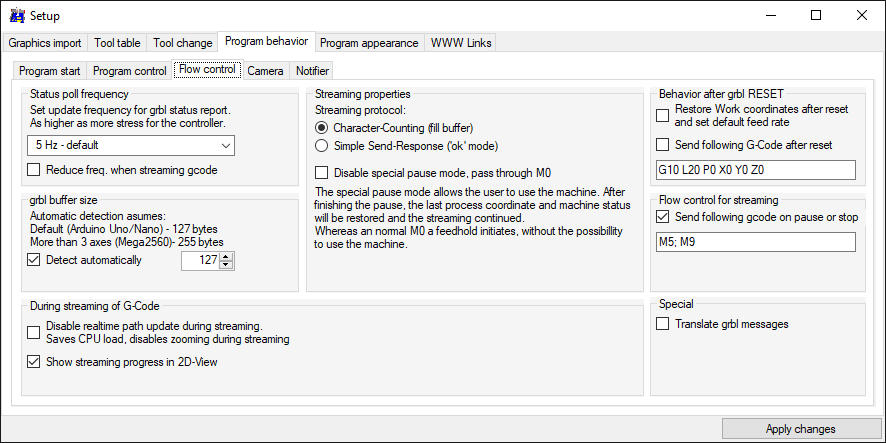
Flow control
Status poll frequency: frequency of grbl position update
Grbl buffer size: depends on used hardware and grbl version
Streaming properties: modes, check here character counting
During streaming of G-Code: setting which could reduce CPU load for older computers
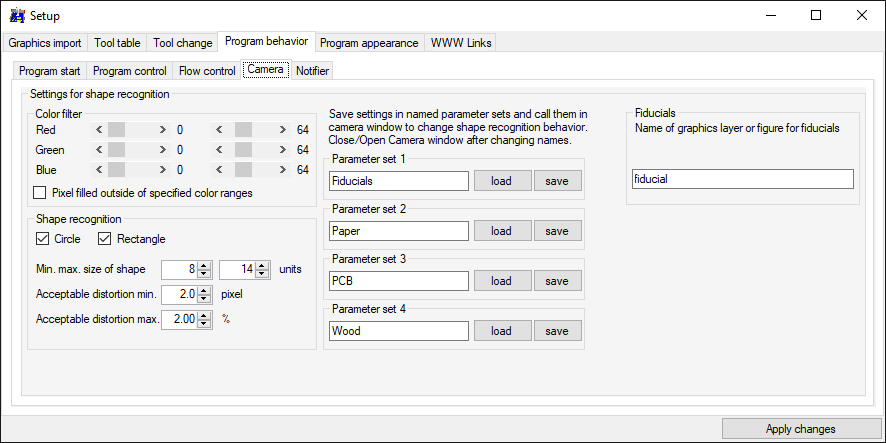
Camera
Settings for shape recognition in camera form - for automatic fiducial correction
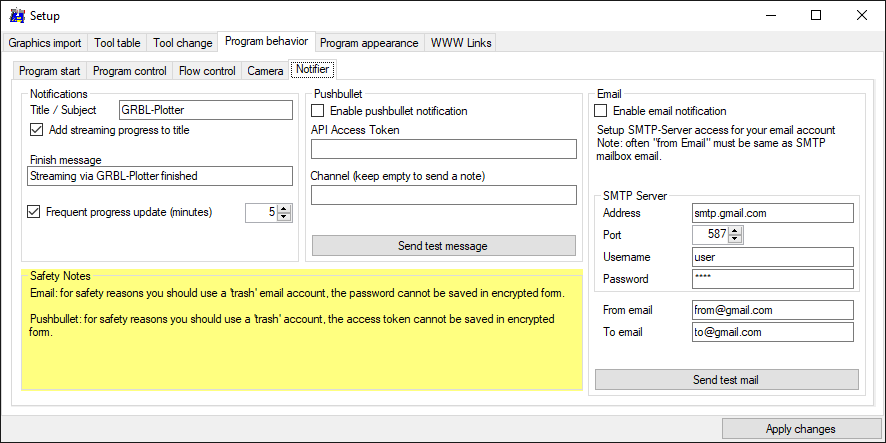
Notifier
Get updates of your streaming progress via pushbullet or by email
Program appearance:
Settings regarding the Graphical User Interface, Hot-Keys, Game pad, Joystick...
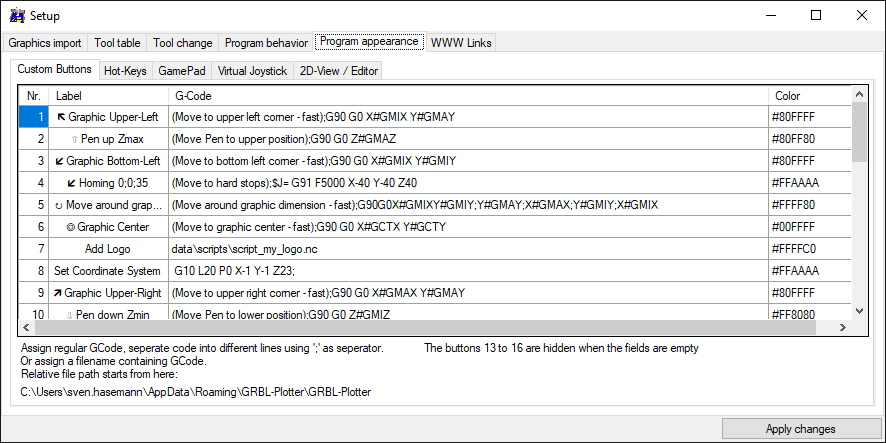
Custom buttons
Custom buttons can also be changed via right-click on button
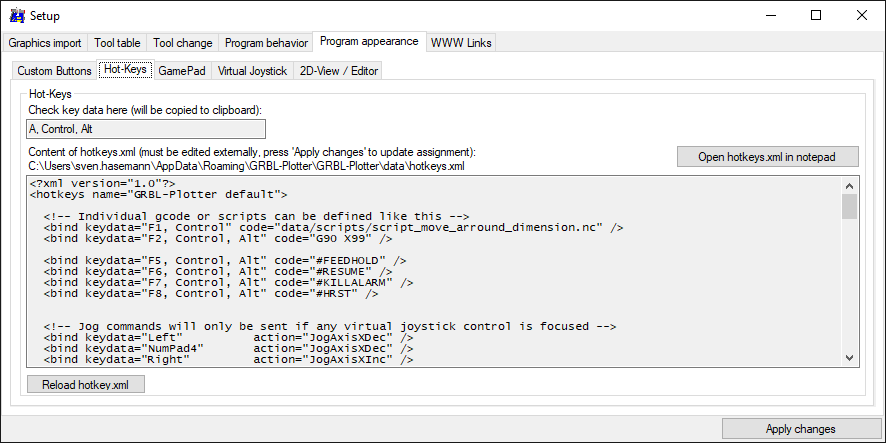
Hot keys
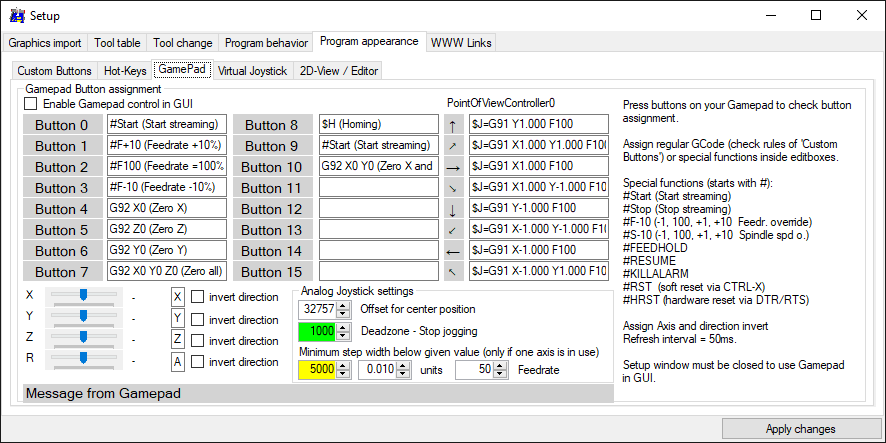
Game pad

Virtual joystick
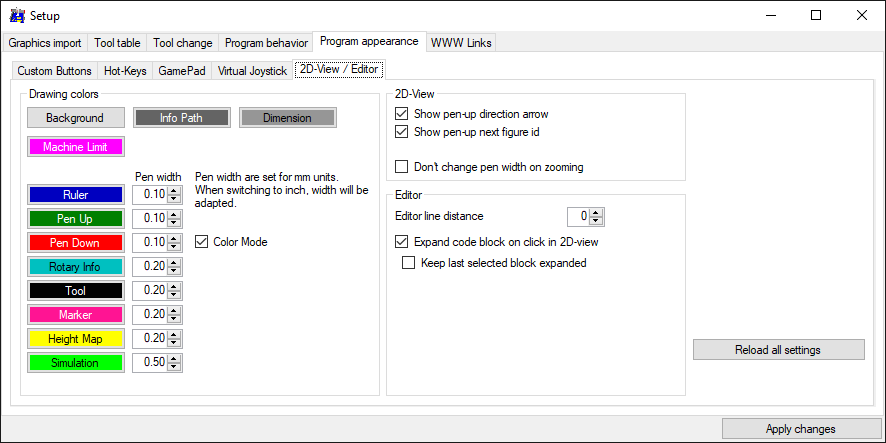
2D view
