Height scan
G-Code Creation: [Text] [Barcode] [Image] [Simple shapes] [Jog path] [Extensions]
Workpiece: [Probing] [Height map]
Machine: [Laser tools] [Coordinate systems] [DIY Control] [Camera] [Process automation]
back to [Menu]
With surface scan the surface of a workpiece can be probed in Z direction and a height-map can be created.
A height map can be loaded, saved and exported as a bitmap and in stl, obj and x3d format.
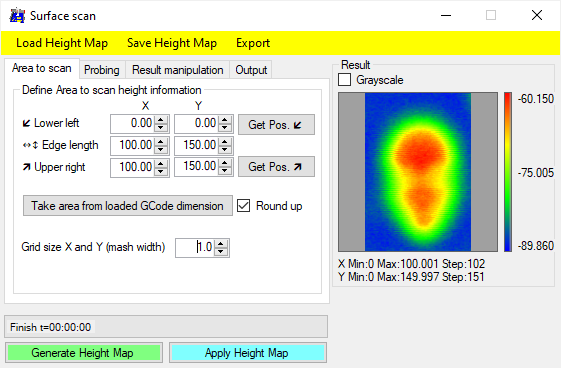
Area to scan:
- Lower left point: work coordinates of lower left point, with "Use actual Pos." the actual work coordinates will be inserted.
- Edge length: the length and width of the area to scan. If changed, the "Upper right point" will be corrected.
- Upper right point: work coordinate of upper right point, with "Use actual Pos." the actual work coordinates will be inserted. "Edge length" will be corrected.
- Grid size: distance between probing positions.
- Generate Height Map: starts the scan process.
- Apply Height Map: applies the current height map to the already loaded G-Code: Z values of the height-map will be added to the G-Code.
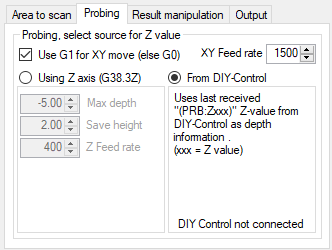
Probing:
- Select movement speed between probing positions and feedrate if G1 is selected
- Choose between regular probing via Z axis or Z.value from DIY-Control interface
Using Z axis (regular Probing):
- Max depth: max. distance to move down, where to expect contact with workpiece.
- Save height: Z position, when moving from one probing coordinate to the next.
- Probing speed: feedrate for the probing command (Z axis).
From DIY Control:
- Check: External depth sensor
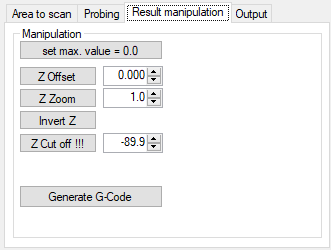
Result manipulation:
- set max. value = 0.0: after the scan an offset can be applied to all z-values to get a maximum value of 0.0.
- Z Offset: offset all z values of the height map with an individual value.
- Z Zoom: multiply all z values of the height map with the given value.
- Invert Z: changes the sign of all z values of the height map.
- Z Cut off: sets all z values below given value to given value.
- Generate G-Code: create G-Code to 'reproduce' height map.
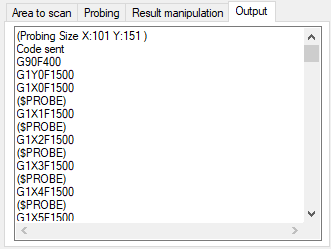
Output:
The Gcode to move to the probing positions will be shown here.
Getting the height map of a coin, using the probe input
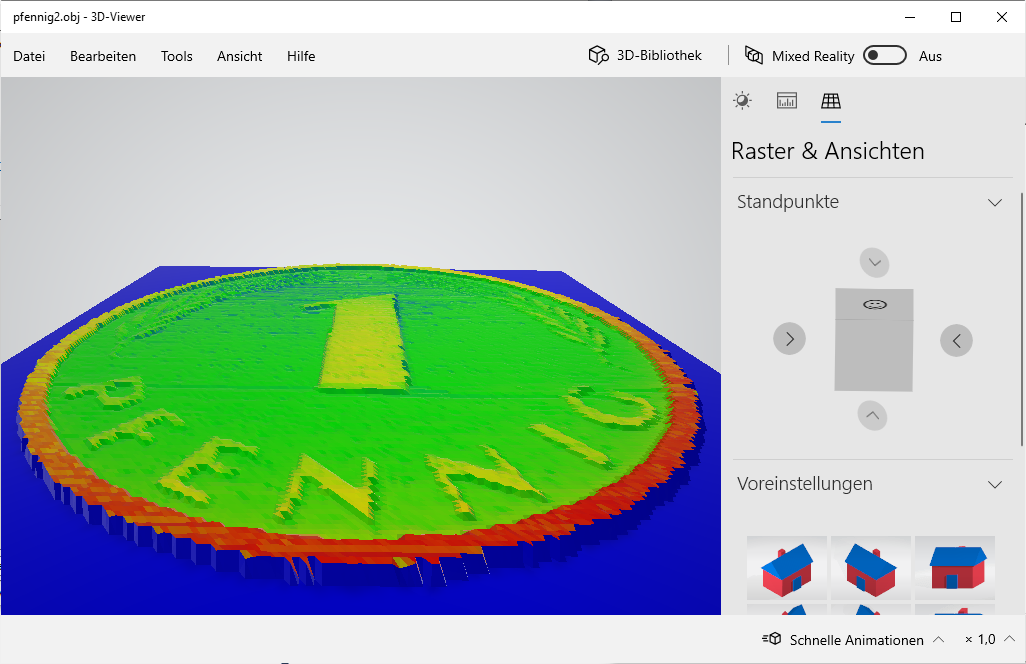
Height map exported as OBJ format and imported in windows 3D-Viewer.
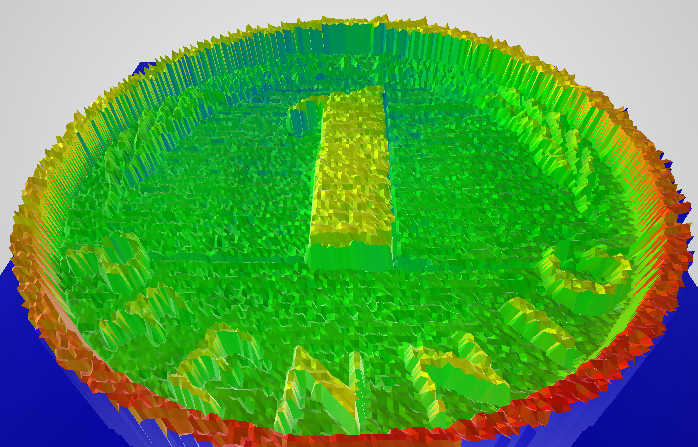
Height map zoomed in Z by factor 10, then exported as OBJ format and imported in windows 3D-Viewer.
Getting the height map of a plaster face, using an external depth sensor